6. Reference Systems
Cartesian coordinate systems are represented by three perpendicular axes that are defined with respect to an origin, and with directions defined for each axis [86]. Locations of planetary bodies and satellites can be determined in an Earth-centered Earth-Fixed coordinate system (ECEF) [53, 57]. ECEF is a Cartesian coordinate system with \(x\), \(y\), and \(z\) defined with respect to the Earth’s center of mass. The \(z\) axis is aligned with the Earth’s rotation axis, the \(x\) axis is aligned with the intersection of the prime meridian and the equator, and the \(y\) axis is aligned with 90° east longitude and the equator. The \(xy\) plane is also called the equatorial plane.
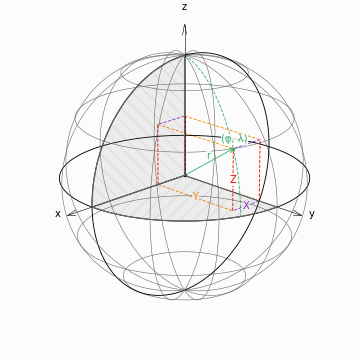
Figure 6.1: Geocentric Cartesian Coordinate System
Geodetic coordinates (longitude \(\lambda\), latitude \(\varphi\), and height \(h\)) are used to describe the position of a point on the Earth with respect to a defined ellipsoid. Changing the terrestrial reference system can involve both translations and rotations of the reference system [86]. One method of transformation involves converting from a geographic coordinate system into a Cartesian coordinate system, and then performing matrix transformations [Equation 6.1].
The transformation from ellipsoidal coordinates of a point in space to Cartesian coordinates is calculated by:
where \(N\) is the radius of curvature in the prime vertical [Equation 6.3], \(e\) is the ellipsoidal eccentricity, with the squared eccentricity \(e^2\) given by [Equation 6.4], \(a\) is the semi-major axis of the ellipsoid, and \(f\) is the ellipsoidal flattening [35, 86]. Ellipsoid definitions typically specify the semi-major axis (\(a\)) and flattening (\(f\)), and datum definitions additionally include the coordinate system origin [35, 86]. In general, objects move with respect to the coordinate system, and the coordinate system itself moves and rotates in space [86]. Coordinate system definitions, such as the International Terrestrial Reference Frame (ITRF), will often include a time component to account for these changes.
6.1. Geocentric Coordinates
Similar to ECEF cartesian coordinates, geocentric coordinates are defined with respect to the center of the Earth [35, 80]. Geocentric coordinates are used to estimate Spherical Harmonics coefficients, and for performing coordinate system rotations. Geocentric longitudes are identical to geodetic longitudes, but geocentric latitudes can differ from geodetic latitudes by approximately 0.2 degrees.

Figure 6.3: Difference between Geodetic and Geocentric Latitude
6.2. Celestial Reference Systems
Celestial reference systems are used to describe the positions of celestial bodies in the sky. Transforming between celestial (\(\mathbf{x}_{CRS}\)) and terrestrial (\(\mathbf{x}_{TRS}\)) reference systems involves a set of transformation matrices for frame bias (\(\mathbf{B}\)), precession (\(\mathbf{P}\)), nutation (\(\mathbf{N}\)), Earth’s rotation (\(\mathbf{T}\)), and polar motion (\(\mathbf{W}\)) [10, 11, 86].
In pyTMD, these transformations are used to convert planetary ephemerides from a celestial reference frame to a terrestrial reference frame.
6.3. Geoid Height
The height above mean sea level of a point on the Earth is defined with respect to an irregular surface known as the geoid. The geoid is the instantaneous shape of the Earth’s gravitational field, which would coincide with global mean sea level if the oceans were at rest. It is an equipotential surface, or a surface of constant potential energy [35]. The distance between the geoid and the reference ellipsoid is called the geoid height (\(N\)) [35].

Figure 6.5: Relationship between ellipsoid height, geoid height, and topographic height [97]