8. Astronomy
8.1. Ephemerides
The geocentric positions of the Sun and Moon determine the magnitude of the major tide-generating potentials at locations on the Earth’s surface [see Tide-Generating Potential].
Ephemerides are tables or mathematical representations giving the positions of astronomical bodies as a function of time.
pyTMD can calculate these positions using either high-precision numerical ephemerides from JPL or one of several analytical approximations.
The JPL ephemerides are numerically integrated solutions to the equations of motion for the planets, Sun and Moon and are provided in the form of binary “kernels”.
They are computed from a comprehensive set of observations including spacecraft radio range data, lunar laser range data, and Very Long Baseline Interferometry (VLBI) measurements [27, 63].
pyTMD uses the jplephem package to read the JPL ephemeris kernels using pyTMD.astro.solar_ephemerides() and pyTMD.astro.lunar_ephemerides().
The data is provided in the celestial reference frame, which pyTMD transforms to get locations in reference to the Earth.
pyTMD can also use analytical approximations to compute the solar and lunar positions using pyTMD.astro.solar_approximate() and pyTMD.astro.lunar_approximate().
These express the solar and lunar coordinates as a truncated trigonometric or polynomial series [53].
They are less accurate than using ephemerides, but are faster to compute and do not require downloading the kernel files.
Method |
Solar |
Lunar |
Reference |
|---|---|---|---|
|
✔ |
✔ |
Meeus [53] |
|
✔ |
Bretagnon and Francou [9] |
|
|
✔ |
✔ |
Montenbruck [57] |
|
✔ |
✔ |
Kubo [41] |
8.2. Zenith Angles
The zenith angles of the Sun and Moon are important for calculating the total tidal potentials, as they determine the position of the celestial body relative to a position on the Earth’s surface.
where \(\psi\) is the zenith angle, \(\varphi\) is the latitude on the Earth’s surface, \(\delta\) is the declination of the celestial body, and \(h\) is the local hour angle of the celestial body.
This is equivalent to the dot product between the unit vectors of the celestial body and the position on the Earth’s surface.
pyTMD takes advantage of this relationship in order to calculate the zenith angles of the Sun and Moon using their positions in Cartesian coordinates [see Ephemerides].
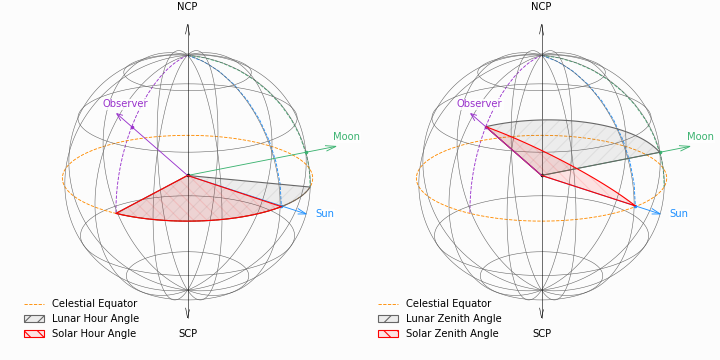
Figure 8.1: Hour Angles and Zenith Angles of the Moon and Sun
8.3. Nutation
The angle between the equator and the orbital plane of Earth around the Sun (the ecliptic) defines the inclination of the Earth’s rotation axis (obliquity of the ecliptic). Nutations are the periodic oscillations of the Earth’s rotation axis around its mean position, which arise from the time-varying torques exerted on Earth’s equatorial bulge [16, 94]. These largely short-period wobbles have durations ranging from subdaily to multi-annual, which are superimposed on the much slower precession of the rotation axis [16]. The Earth’s nutation is conventionally resolved into two components measured with respect to the ecliptic [16, 53]:
Nutation in longitude (\(\Delta\psi\)): shift in the position of the true vernal equinox along the ecliptic
Nutation in obliquity (\(\Delta\varepsilon\)): variation in the tilt of Earth’s equator with respect to the ecliptic
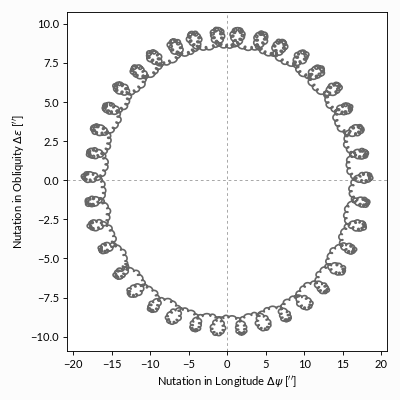
Figure 8.3: Nutation in longitude (\(\Delta\psi\)) and obliquity (\(\Delta\varepsilon\)) over the 18.6-year lunar nodal cycle
These two quantities help define the orientation of the true equator and equinox of date relative to the mean equator and equinox. For instance, the instantaneous (true) obliquity of the ecliptic is:
where \(\bar\varepsilon\) is the mean obliquity [10, 11]. These nutation angles (\(\Delta\psi\) and \(\Delta\varepsilon\)) and the mean obliquity (\(\bar\varepsilon\)) are combined when forming the nutation rotation matrix (\(\mathbf{N}\)) used in the transformation from celestial to terrestrial reference frames [see Equation 6.5] [39, 65].
The difference between Greenwich Apparent Sidereal Time (GAST) and Greenwich Mean Sidereal Time (GMST) defines the “equation of the equinoxes”, which is calculated using the nutation terms along with higher-order complementary terms [see Sidereal Time] [10, 11, 65].
pyTMD.astro.itrs() calculates GAST when forming the ITRS rotation matrix for converting a celestial reference frame to an Earth-centered Earth-fixed (ECEF) reference frame [see Ephemerides] [65].
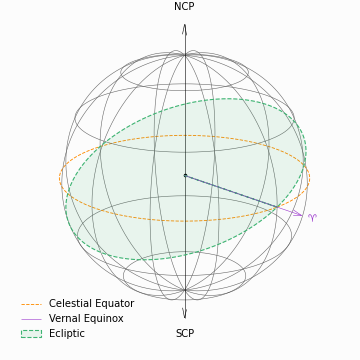
Figure 8.5: Ecliptical Plane and Vernal Equinox in the Celestial Sphere
8.4. Precession
8.4.1. Nodal Precession
The precession of the Moon’s orbital plane causes the maximum declination of the Moon to vary between approximately 18 and 28 degrees, with the average equal to the Earth’s equatorial inclination (approximately 23 degrees) [76]. One revolution of this precession is completed approximately every 18.6 years [22]. When the Moon is at its maximum declination, the difference in tide potential causes the (lunar) diurnal tides to be at their largest. Conversely, when the Moon is at its minimum declination, the difference causes the (lunar) semi-diurnal tides to be at their largest.
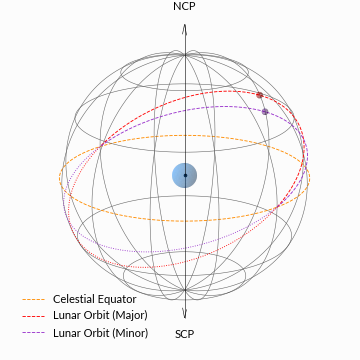
Figure 8.7: Lunar Orbits over the 18.6-year Nodal Cycle
8.4.2. Apsidal Precession
The orbits of the Moon around the Earth and the Earth around the Sun are both elliptical. For the moon around the Earth, the closest point is called the perigee and the furthest point is called the apogee. Whereas for the Earth around the Sun, perihelion is the closest point and aphelion the furthest point. The line connecting the perigee and apogee (or perihelion and aphelion) is called the apsides line and it precesses with respect to the vernal equinox. One revolution of the apsidal precession is completed approximately every 8.8 years for the Moon around the Earth and after 21,000 years for Earth around the Sun [22, 76]. These precessions independently affects tidal signals [see Arguments], and modulate the amplitude and phase of other tidal constituents [22].
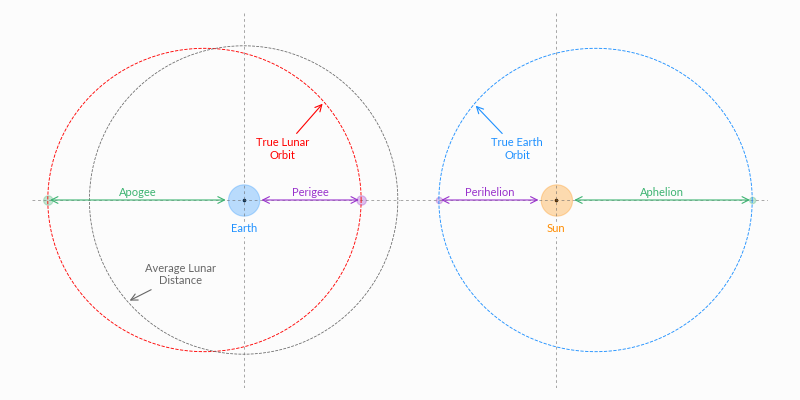
Figure 8.9: Lunar Perigee and Solar Perihelion
8.5. Arguments
The tide potential is a function of the position of the Sun and Moon with respect to the Earth. The complete movements of the three bodies in three dimensions are very complicated, and typically require the use of numerical ephemerides [67]. Doodson and Lamb [20] described the approximate positions in terms of fundamental astronomical arguments. Each of these arguments can be accurately calculated using polynomial expansions of time [53, 79]. The rates of change of these arguments are the fundamental frequencies of the astronomical motions [37, 67].
Argument |
Description |
Period |
|---|---|---|
\(\tau\) |
lunar hour angle |
1.03505 days |
\(S\) |
mean longitude of the Moon |
27.32158 days |
\(H\) |
mean longitude of the Sun |
365.2549 days |
\(P\) |
mean longitude of lunar perigee |
8.847 years |
\(N\) |
mean longitude of ascending lunar node |
18.61 years |
\(Ps\) |
mean longitude of solar perigee |
21,000 years |
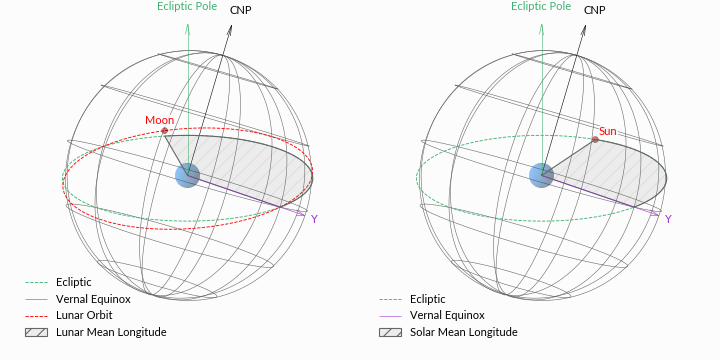
Figure 8.11: Mean Longitudes of the Moon (\(S\)) and Sun (\(H\))
The lunar hour angle (\(\tau\)) in degrees can be determined from the solar time (\(t\)) in hours using the mean longitudes of the Moon (\(S\)) and Sun (\(H\)):
When calculating nutation, IERS conventions use Delaunay arguments as the fundamental orbital elements [11, 65, 94].
Argument |
Description |
Period |
|---|---|---|
\(\gamma\) |
mean sidereal time |
0.99727 days |
\(l\) |
mean anomaly of the Moon |
27.5545 days |
\(l'\) |
mean anomaly of the Sun |
365.2596 days |
\(F\) |
mean argument of latitude of the Moon |
27.2122 days |
\(D\) |
mean elongation of the Moon from the Sun |
29.5306 days |
\(\Omega\) |
mean longitude of ascending lunar node |
18.61 years |
From Dehant and Mathews [16], these arguments can be calculated from Doodson arguments using the following relationships:
And conversely: